



Di solito nel processo di utilizzo del joystick, ci sono due modi per ottenere il segnale di uscita analogico: forma del sensore Hall e tipo di potenziometro.
1, questo articolo mira a chiarire il principio di implementazione di base del sensore Hall, le differenze, i vantaggi e gli svantaggi tra 2D Hall e 3D Hall.
Definizione di effetto Hall:
L'effetto Hall fu scoperto dal fisico Hall nel 1879. Definisce la relazione tra campo magnetico e tensione indotta. Questo effetto è completamente diverso dall'induzione elettromagnetica tradizionale.

——Immagine da Internet
Come mostrato sopra, quando una corrente elettrica passa attraverso un conduttore situato in un campo magnetico (la superficie ombreggiata), il campo magnetico esercita una forza sugli elettroni nel conduttore perpendicolare alla direzione del moto degli elettroni, determinando una differenza di potenziale in entrambe le direzioni perpendicolari al conduttore e alla linea di induttanza magnetica.
Quando un campo magnetico perpendicolare alla direzione della corrente viene applicato al semiconduttore, gli elettroni e le lacune nel semiconduttore saranno attratti dalla forza di Lorentz in direzioni diverse e si aggregheranno in direzioni diverse. Il campo elettrico sarà generato tra gli elettroni e le lacune raccolti. Dopo che la forza del campo elettrico e la forza di Lorentz sono bilanciate, non si aggregheranno più. In questo caso, il campo elettrico renderà gli elettroni e le lacune successivi soggetti alla forza del campo elettrico e bilancerà la forza di Lorentz generata dal campo magnetico, in modo che gli elettroni e le lacune successivi possano passare agevolmente senza deviazioni, che è l'effetto Hall . La differenza di tensione tra i due lati è chiamata tensione di Hall.

Diagramma schematico
L'elettrone crea una differenza di potenziale nel campo magnetico risultante in una forza di Lorentz
Forza di Lorentz F=qE più qvB/c
Quindi il campo di Hall
UH=RH·I= -B·I /(q·n·c)
Applicazione dell'effetto Hall:
Sebbene l'effetto Hall sia stato scoperto in precedenza, è stato limitato dallo sviluppo di magneti costanti e componenti elettronici. I sensori Hall sono apparsi per la prima volta intorno agli anni '70.
Il sensore Hall di base è progettato come un circuito integrato con chip Hall altamente affidabile confezionando il chip del circuito di materiale a cristallo singolo di silicio in una struttura di imballaggio a tenuta d'aria.
Tuttavia, a causa di problemi di progettazione del circuito, il chip Hall utilizzato per la prima volta produrrà grandi variazioni di tensione dovute alla deriva della temperatura, che non possono essere applicate nell'ambiente industriale reale.
Successivamente, fino agli anni '90 circa, alcune aziende, come MLX, hanno utilizzato circuiti di compensazione della temperatura per compensare l'influenza dei parametri relativi alla temperatura nella formula di calcolo del campo magnetico, in modo che il campo magnetico non cambi con la temperatura. Inoltre, il chip Hall ha realizzato un funzionamento programmabile, che non ha bisogno di adattare l'uscita analogica impostata dal chip Hall ai requisiti di utilizzo e amplia notevolmente lo scenario di utilizzo e l'ambito del chip Hall.
Il chip Hall ha iniziato ad essere ampiamente utilizzato nell'ambiente industriale e dei veicoli, utilizzato per giudicare i parametri di spostamento e angolo di rotazione e convertirli in uscita analogica.
Dopo la società MLX, molti produttori di circuiti integrati in patria e all'estero si sono uniti allo sviluppo del chip Hall. Il chip Hall convenzionale utilizzato ora è solitamente costituito da più chip Hall sovrapposti per il giudizio di ridondanza, che migliora notevolmente la risoluzione e la precisione dell'uscita analogica.
Uso di Hall nel manico:
Le prime maniglie industriali raggiungevano l'uscita analogica attraverso la struttura rotante della maniglia, che spingeva il proiettile per azionare la valvola idraulica. Ci saranno carenze nel controllo intelligente e nella progettazione logica, e il dispositivo idraulico avrà inevitabilmente un fenomeno di perdita d'olio, che non può essere utilizzato nella scena con requisiti di alto livello di inquinamento o nella scena che richiede un ambiente pulito.

Uso idraulico della forma proiettile
——Immagine da Internet
Hall è stato utilizzato per la prima volta nei joystick da Danfoss, un produttore tedesco. I suoi prodotti principali sono JS1, JS1000 e così via.
I produttori di chip Hall sono comunemente usati nella maniglia, inclusi MLX, TI, McGahn e così via.
Esistono differenze tra la sala del piano 2D e la sala 3D in base ai diversi metodi di utilizzo.
Differenza tra Sala 2D e Sala 3D:
Normalmente, l'uso di Hall nella maniglia è diviso in rotazione, spostamento e oscillazione. Il tipo rotante è 2D Hall e il tipo di spostamento e oscillazione è 3D Hall.
* Notare l'uso dell'acciaio magnetico:
Indipendentemente dalla forma della sala, ci sono due requisiti di controllo critici per ottenere la stabilità del lavoro della sala.
Il primo è la distanza tra l'acciaio magnetico e il centro di Hall, che varia a seconda dei diversi modelli di chip Hall. È generalmente di circa 1 ~ 5 mm.
La seconda è la dimensione della magnetizzazione dell'acciaio magnetico, secondo il modello di chip Hall è diversa, generalmente da dozzine di mT a centinaia di mT.
Se uno dei due parametri è fuori intervallo o la deviazione è ampia, causerà l'instabilità del chip Hall, con conseguente mutazione dell'uscita o deviazione dell'uscita.
Inoltre, in generale, l'acciaio magnetico non causerà deviazioni di uscita dovute alla smagnetizzazione durante il suo utilizzo a lungo termine e il suo parametro chiave è la coercitività dell'acciaio magnetico. La coercitività si riferisce all'intensità di induzione magnetica B che non ritorna a zero quando il campo magnetico esterno ritorna a zero dopo la magnetizzazione di saturazione dei materiali magnetici. Solo aggiungendo un campo magnetico di una certa dimensione nella direzione opposta al campo di magnetizzazione originale, l'intensità dell'induzione magnetica può tornare a zero, che è chiamata campo magnetico coercitivo o forza coercitiva.
In generale, la coercitività dell'acciaio magnetico richiede Hcb maggiore o uguale a 850KA/m; Coercitività intrinseca Hcj Maggiore o uguale a 955KA/m. Il principale fattore di influenza è il materiale dell'acciaio magnetico. Generalmente, la coercitività del materiale di ferrite è piccola, il che porterà alla smagnetizzazione dell'acciaio magnetico per lungo tempo. E la coercitività del materiale NdFeb è maggiore, di solito ad alta temperatura non a lungo termine (superiore a 60 ~ 80 gradi) nelle condizioni d'uso, l'uso di circa cinque o dieci anni è più che sufficiente.
L'acciaio magnetico utilizzato per la maniglia è solitamente acciaio magnetico N35 Ndfeb.
Altri elementi controllati dell'acciaio magnetico sono la rimanenza Br e il prodotto di massima energia magnetica BH(max).
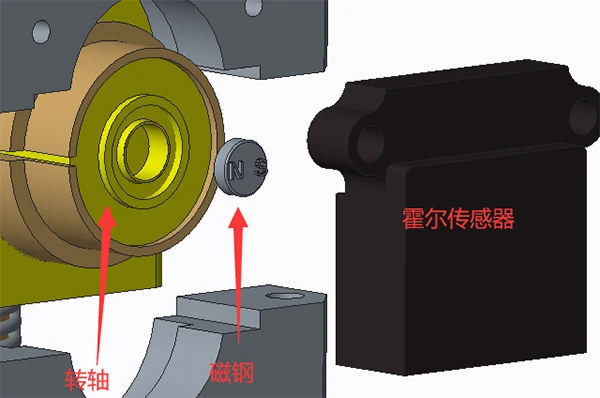
1. Tipo rotativo:
La Rotary Hall è solitamente posizionata al centro dell'asse di rotazione e la direzione della magnetizzazione è radiale. Quando l'albero della maniglia viene ruotato, la tensione Hall viene generata a causa della variazione del flusso magnetico attraverso il sensore Hall.
I vantaggi di questo metodo di utilizzo sono:
1. Buona simmetria di tensione;
2. Bassa difficoltà realizzativa;
3. Nel caso della maniglia a doppio albero, l'interferenza dell'asse XY è piccola;
4. La maniglia ad asse singolo occupa meno spazio.
5. Bassa difficoltà di magnetizzazione.
6. L'angolo di rotazione può essere ampio (meno di 360 gradi)
Gli svantaggi sono:
1. Quando viene realizzata la maniglia a doppio asse, deve occupare uno spazio relativamente ampio;
2. Deve essere utilizzato nel centro di rotazione.
Tipo di rotazione
1. Formula di spostamento:
Di solito, l'uso dello spostamento è anche l'uso di 3D Hall, come il primo chip MT1531 di bandiera. Di solito la direzione della magnetizzazione è radiale. In questo modo, l'acciaio del campo magnetico dovrebbe avere un flusso magnetico di 0mT nel punto medio, che è massimo su entrambi i lati. Quando l'acciaio magnetico viene magnetizzato in questo modo, è necessario avere requisiti sull'uniformità di magnetizzazione su entrambi i lati dell'acciaio magnetico a nastro o dell'acciaio magnetico curvo. Se la dimensione magnetica è diversa, la distribuzione del flusso magnetico sarà irregolare, con conseguente deviazione lineare dell'uscita su entrambi i lati quando la maniglia viene scossa.
Vantaggi:
1. La struttura è semplice e il prezzo della sala dislocamento è basso;
2. La fase strutturale dell'acciaio magnetico che è difficile da posizionare nel centro di rotazione è migliore;
3. Struttura flessibile, può fare più varietà di struttura.
Svantaggi:
1. L'acciaio magnetico necessita di simmetria magnetizzante;
2. In generale, è molto difficile realizzare la simmetria lineare della formula di spostamento;
3. L'angolo di rotazione non dovrebbe essere troppo grande; (di solito non superiore a 40 gradi)

——Immagine dalla specifica MLX90333
1. Tipo di oscillazione:
Oscillating Hall è una realizzazione comune di sala biassiale. Realizza l'uscita a doppio asse o anche multiasse di un chip sovrapponendo più chip Hall su un sensore Hall.
Di solito, la direzione della magnetizzazione dell'acciaio magnetico è la magnetizzazione assiale e la magnetizzazione assiale dell'acciaio magnetico circolare ridurrà notevolmente la difficoltà della magnetizzazione.

——Immagine dalla specifica MLX90333
Per i sensori Hall, sebbene un singolo chip 3D sia più costoso di un chip 2D, il costo dell'implementazione di un'uscita biassiale è relativamente inferiore rispetto all'utilizzo di due chip 2D.
Vantaggi:
1. L'acciaio magnetico ha una bassa difficoltà di magnetizzazione. Bassa difficoltà di montaggio;
2. Il costo di realizzazione biassiale è basso;
3. Lo spazio orizzontale della maniglia è meno occupato;
Svantaggi:
1. Il requisito di offset della patch Hall è relativamente elevato e il requisito di offset di SMT non è generalmente superiore a 1/2 del piede di saldatura; In caso contrario, ci sarà una grande interferenza biassiale (ovvero, quando si spinge un asse, l'altro asse presenta fluttuazioni di uscita, 3D Hall non può evitare l'interferenza biassiale, ma generalmente all'interno dell'intervallo di deviazione dell'uscita è considerato qualificato)
2. Il costo per ottenere un output uniassiale sarà più elevato;
3. L'angolo di rotazione è inferiore al tipo di spostamento (generalmente non superiore a 30 gradi);
La maniglia HJ8 di Shanghai Chen Gong Electric Control utilizza la 3D Hall di MLX90333.
II. Fattori che influenzano la deviazione dell'uscita di Hall:
In generale, i fattori che influenzano la tensione di uscita Hall sono principalmente i seguenti motivi. In generale, poiché il chip raramente si guasta, le cause della deviazione della tensione di uscita vengono analizzate principalmente dalle variazioni del flusso magnetico:
1. Variazioni del flusso magnetico causate dall'acciaio magnetico:
L'acciaio magnetico cambierà il flusso magnetico e quindi la tensione di uscita per vari motivi, come ad esempio:
R. Una scarsa protezione porta all'assorbimento di polvere di ferro sull'acciaio magnetico, con conseguente cambiamento del flusso magnetico.
B. Il fissaggio improprio dell'acciaio magnetico porta all'allentamento dell'acciaio magnetico;
C. Esistono crepe nascoste quando l'acciaio magnetico viene rivettato o fissato, il che può portare a crepe e variazioni del flusso magnetico dopo l'alta e la bassa temperatura.
Modi per evitare:
Questi fattori devono essere analizzati e le misure di miglioramento seguite nella FEMA della progettazione e del processo.
2. Variazioni del flusso magnetico causate da cause esterne:
Generalmente, il flusso magnetico attraverso il chip Hall cambia a causa delle fluttuazioni del circuito causate dal campo magnetico esterno o dall'impatto della tensione, influenzando così l'uscita.
Modi per evitare:
È stato eseguito il test EMC e lo scudo è stato utilizzato per aumentare la schermatura del chip Hall.
3. Deviazione dell'uscita causata dalla struttura meccanica:
Dopo un uso a lungo termine, l'aumento del gioco meccanico porta all'aumento della deviazione dell'uscita.
Modi per evitare:
Ottimizza il design strutturale.
4. Tensione di alimentazione esterna non regolata:
In generale, la tensione di ingresso Hall nominale del produttore della maniglia Hall è 5.0Vdc±0.5V, ma in pratica questa tensione si riferisce alla tensione che alimenta il sensore Hall. Se il valore della tensione di uscita della calibrazione è 0.5~2.5V~4.5V di uscita, tensione di ingresso di 5.5V, la tensione di uscita media sarà di 2.75V, oltre l'intervallo dei requisiti mediani. Pertanto, ai clienti viene generalmente consigliato di utilizzare un alimentatore regolato. La deviazione dell'alimentazione è generalmente di ±0.2V con condizioni nell'intervallo migliore di ±0.1V.